Product selection
|
Model |
Phase
number |
Body
length
L(mm) |
Holding
torque
(N.M) |
Rated
current
(A) |
Phase
inductance
(mH) |
Phase
resistance
(Ω) |
Rotor
inertia
(g·cm²) |
Motor
weight
(kg) |
Pin
count |
|
60SC30 |
2 |
109 |
3.0 |
5 |
2.22 |
0.5 |
690 |
1.536 |
4 |
|
60SC40 |
2 |
127 |
4.0 |
5 |
3.47 |
0.86 |
880 |
2.05 |
4 |
|
60SC30-57 |
2 |
112 |
3.0 |
5 |
2.22 |
0.5 |
690 |
1.536 |
4 |
|
60SC40-57 |
2 |
127 |
4.0 |
5 |
3.47 |
0.86 |
880 |
2.05 |
4 |
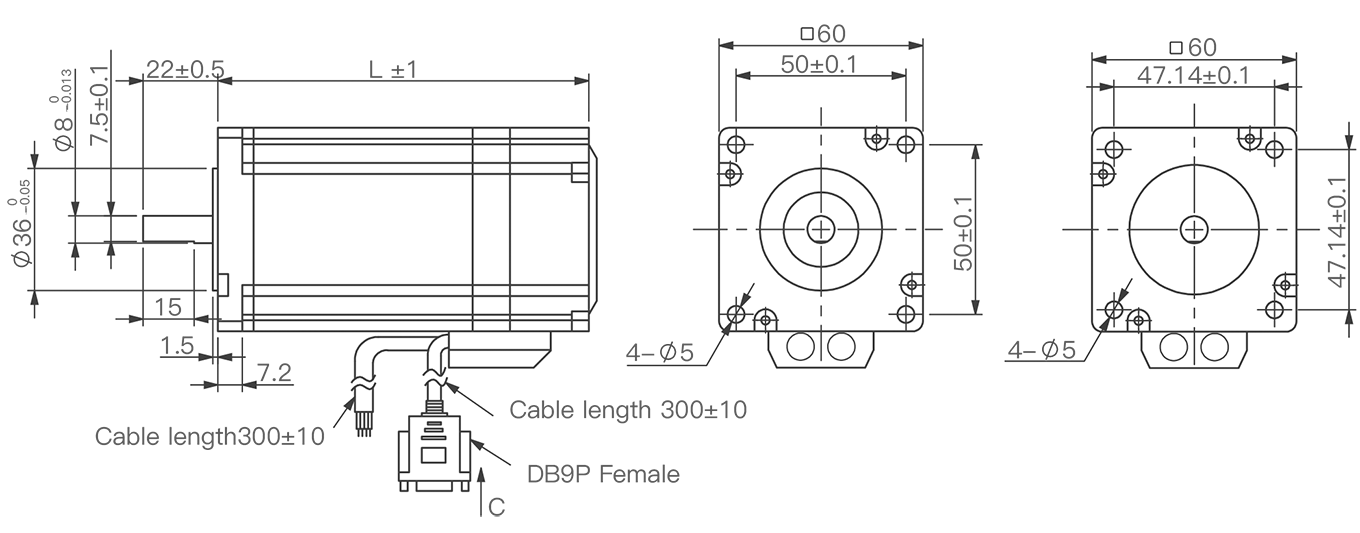
Mechanical dimension
Figure 1:60SC30、60SC40 Figure 2:60SC30-57、60SC40-57
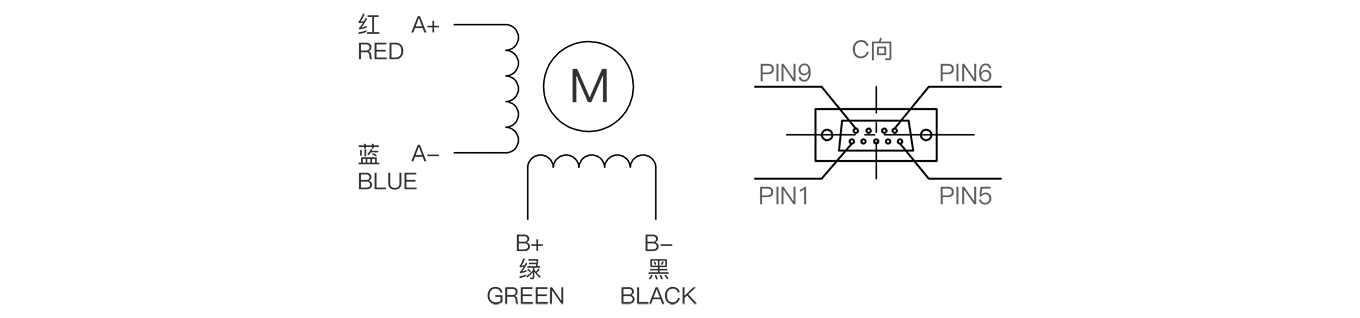
Wiring definition
|
Encoder output cable definition |
|
Number |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
Definition |
EA+ |
EA- |
NC |
EB+ |
EB- |
NC |
NC |
5V |
GND |
|
Cable color |
BN |
WH |
\ |
YE |
GN |
\ |
\ |
RD |
BU |
Note: Please refer to the actual drawings for motor parameters, wiring definitions, etc.
Precautions and related instructions
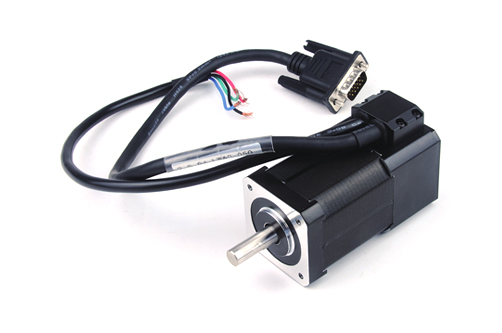
1、Match our hybrid servo driver SC5780 or SC8680, or other manufacturers' drivers. We recommend DC 24Vdc, 36Vdc, or 48Vdc power supply; Please contact us for the drawings of the hybrid servo motor with brake.
2、The standard configuration for encoder resolution is 1000 lines, A B Two channel differential interface, other encoder resolutions, interface and motor shaft specifications can be customized.
3、The definitions of motor wiring and encoder wiring refer to the labeling instructions on the motor. Encoder extension cables are available in 3 meters, 5 meters, and 8 meters for selection. Other specifications of wiring harnesses can be customized.



 VIDEO
VIDEO
 CONTACT
CONTACT